Cyber-Physical Agent-Based Models for Swarm Construction
WS 2
Type
In-person lectures, discussions and tutorial sessions; Live demonstration and working with mobile robots
Venue
Please note: the workshop takes place at the Large Scale Construction Robotics Laboratory in Waiblingen. There will be a bus transfer from Keplerstraße 17.
Participants who want to take part in the AAG 2023 Socializing Tour have to leave the workshop earlier and return to Stuttgart individually via public transport.
Workshop objectives
Participants will be introduced to ABMS in general and then more specifically to approaches to translating architectural construction systems into digital agent systems. The workshop will also involve the transferring of principles learned from digital explorations of ABMS to a physical mobile robotic system. After a series of digital experiments, the participants will be involved in the implementation of their models for the design and control of the physical mobile robots.
Participants requirements
Required skills: Advanced knowledge of Grasshopper and being comfortable with programming in C# or Python.
Required software: Rhino3D and Grasshopper
Required hardware: Personal laptop
Workshop description
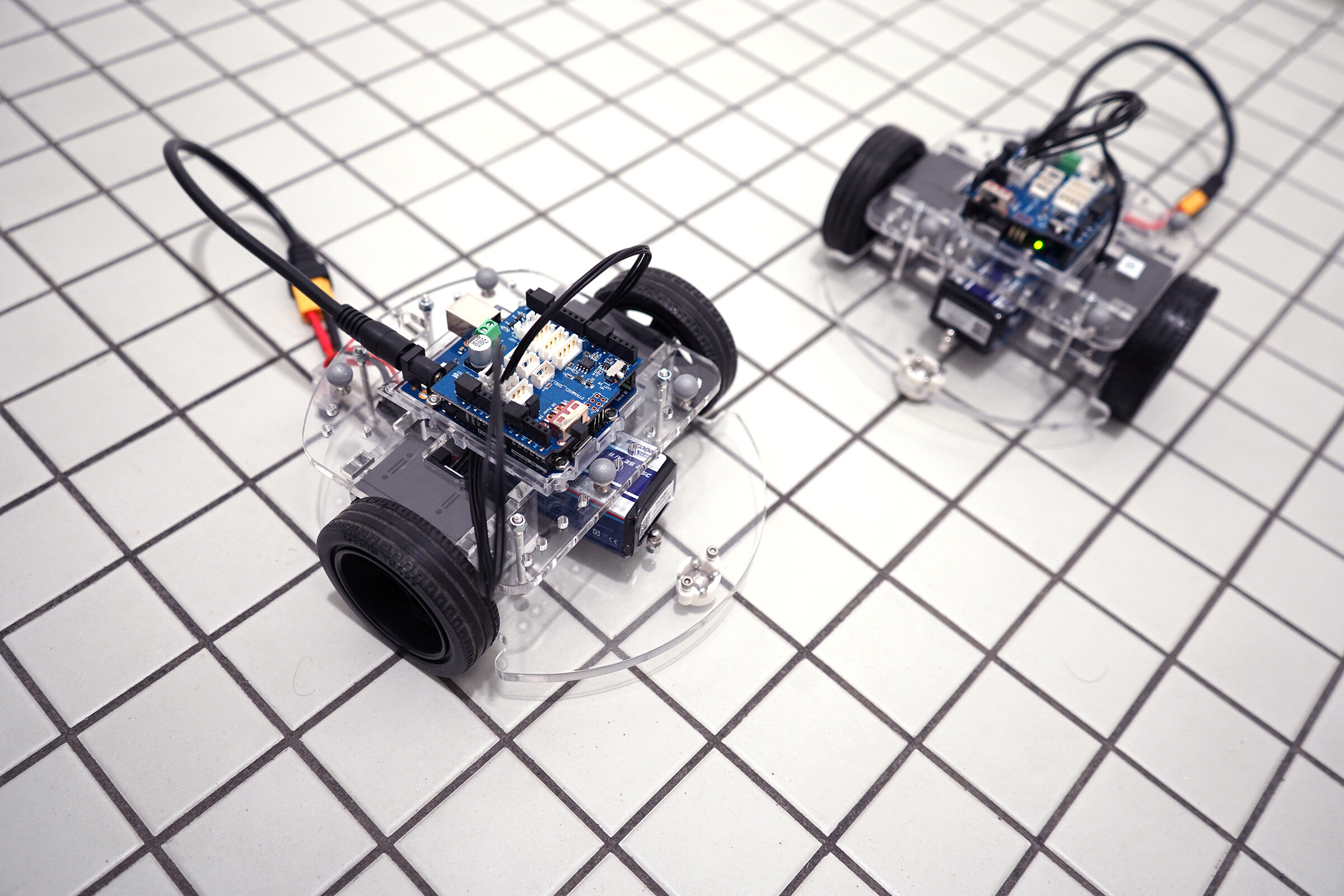
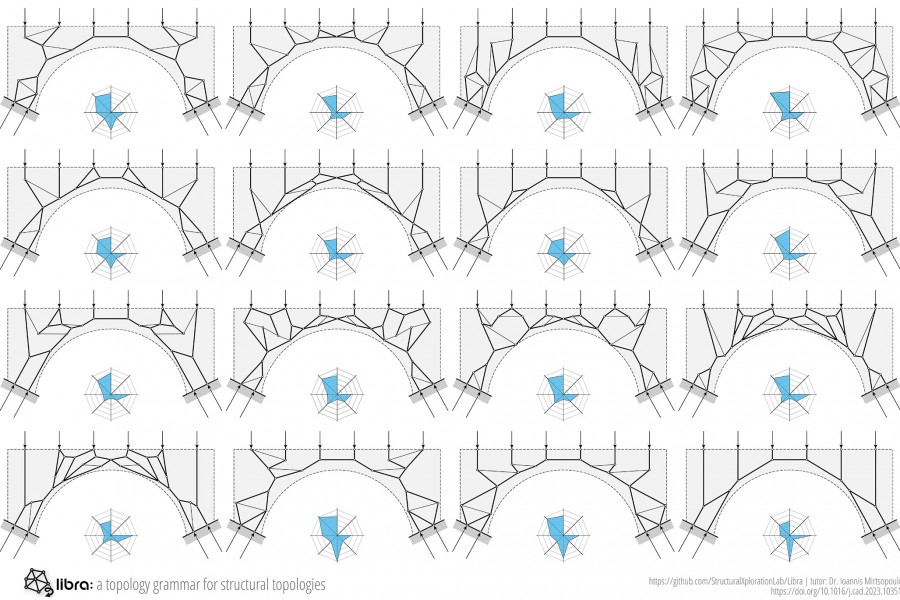
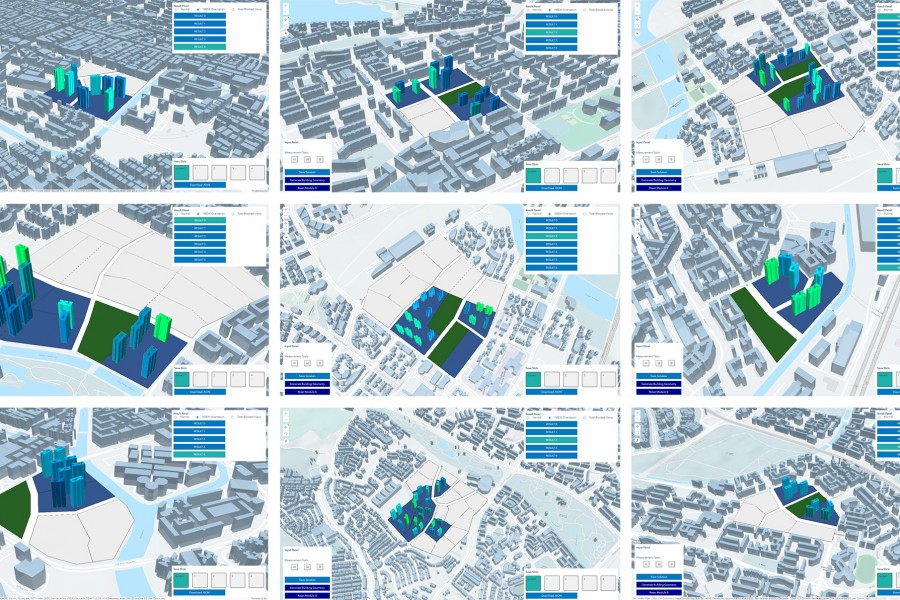
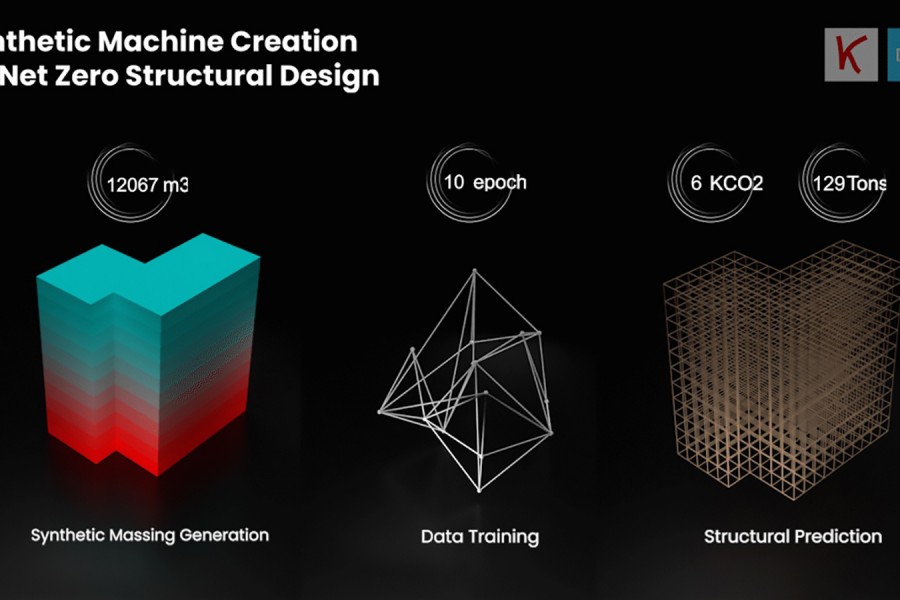
The use of agent-based modeling and simulation (ABMS) to study the dynamics of complex systems has increased significantly among various scientific fields in the last decades. The application of ABMS in disciplines related to Architecture, Engineering and Construction (AEC) has specifically seen a rise for its ability to capture the various levels of complexity inherent to the field, leading to more sustainable building designs and construction processes. In parallel to the increasing investigation of ABMS in architecture, there is a growing interest in collective robotic construction (CRC). CRC involves the utilization of small, generally custom mobile robots for the assembly of structures, which have increasing robustness, adaptivity and level of autonomy compared to existing proposals for automation in construction. Recognizing the potential impacts and fundamental link of the two approaches, the workshop will focus on cyber-physical agent-based models for swarm construction. In more detail, participants of this workshop will: (i) learn the theoretical concepts of ABMS, (ii) be introduced to and explore a software framework for experimentation with agent-based systems for design and fabrication processes and (iii) participate in the implementation of a cyber-physical fabrication loop for the control of a wheeled robot CRC system (see Figures) at the Distributed Robotic Platform of the Large Scale Construction Robotics Laboratory in Waiblingen
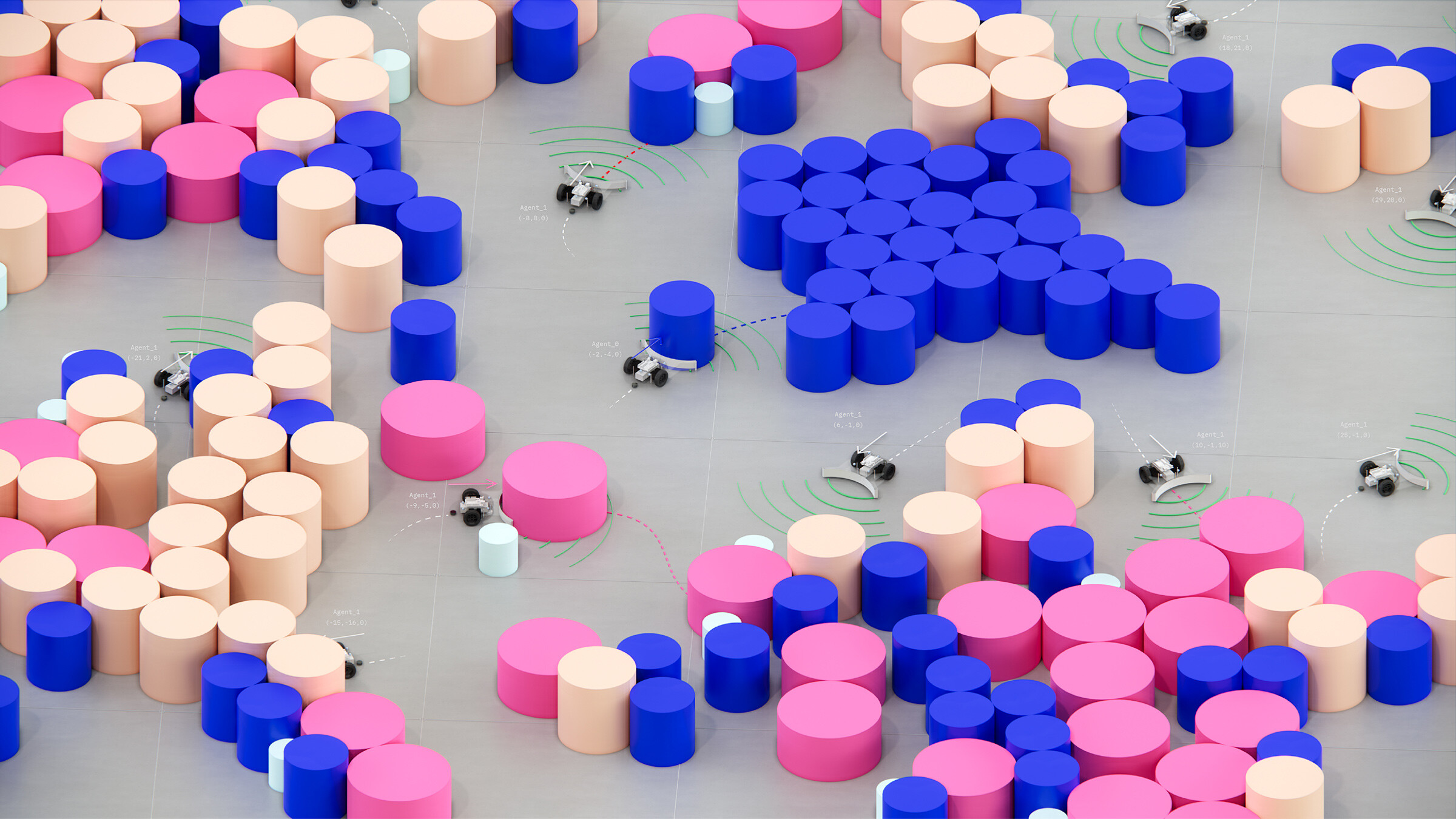
In the first half of the workshop, participants will be introduced to ABMS in general and then more specifically to approaches to translating architectural construction systems into digital agent systems. This will be done with hands-on tutorials in Rhino3D/Grasshopper using ICD’s interactive agent-based modeling framework ABxM. The second part of the workshop will involve the transferring of principles learned from digital explorations of ABMS to a physical mobile robotic system. An agent-based model derived from the iconic flocking example will be provided to the participants as a template for further development of custom behaviors for the physical robots. These custom behaviors will rely on the collection of sensor information external to the digital simulation. After a series of digital experiments, the participants will be involved in the implementation of their models for the design and control of the physical mobile robots. As such, the workshop participants should have advanced knowledge of Grasshopper and be comfortable with programming in C# or Python.
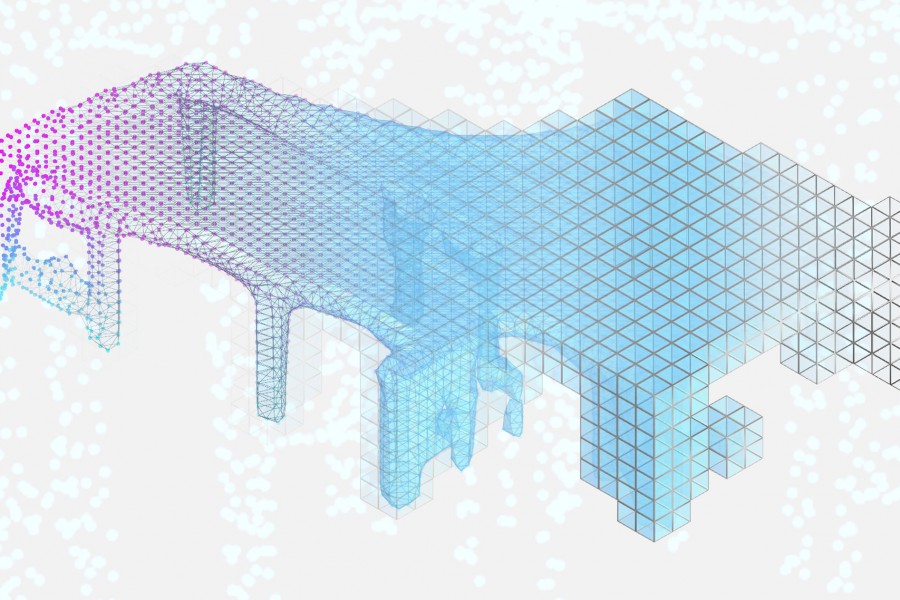
This workshop is relevant to the themes of digital design and simulation, and novel fabrication techniques that are highlighted for AAG 2023. During the introduction and experimentation with ABxM, the participants will learn how ABMS can be utilized for the creation of complex architectural geometries. This will include showcasing how geometric investigation can be explore by providing examples from research at the ICD and helping the participants to develop their own models of architectural systems. Participants will also learn how to transfer notions of behavioral systems to physical robotic systems for real-time operation, a promising approach for the deployment of novel robotic construction automation systems. In such, the participants will become familiar with notions of bottom-up design processes, in which path planning or choreography of the robots is derived through the interactions they make with each other and their environment. Another topic addressed in this workshop will be the processing of sensing information and the discussion of how such information can affect physical fabrication systems. Therefore, the target audience of this workshop would be relatively broad. However, it is probably best suited for members in the AEC industry who are interested in ABMS, CRC, or more generally automation in construction.
Target group
Members in the AEC community who are interested in Agent-Based Modelling and Simulation (ABMS) and/or Collective Robotic Construction (CRC); All academic levels
Number of participatns max.
20
Duration and Procedure
9:00 – 9:30am UTC
Welcome and Introduction to the Workshops
09:45 – 12:15am UTC
Introduction to Agent-Based Modeling (ABM) and ABxM Framework
12:30 – 13:15pm UTC
Bus to Large Scale Construction Robotics Laboratory, Waiblingen (Meeting point: Keplerstraße 17 Stuttgart)
13:15 – 13:45pm UTC
Lunch (will be provided)
13:45 – 15:00pm UTC
ABxM Flocking Examples
15:00 – 15:15pm UTC
Coffee break
15:15 – 16:30pm UTC
Introduction to the physical mobile robots and accompanying ABxM simulation
16:30 – 18:00pm UTC
Getting acquainted with the physical robots and exploration with provided ABM simulation
18:15pm UTC
Bus to Stuttgart
08:30 – 10:15 am UTC
Debugging session and model development
Presentations of models
10:30am UTC
Bus to Large Scale Construction Robotics Laboratory, Waiblingen (Meeting point: Keplerstraße 17 Stuttgart)
12:00 – 13:00pm UTC
Further introduction of the physical part of the agent system
13:00pm – 13:30pm UTC
Lunch (will be provided)
13:30 – 15:45pm UTC
Parallel Sessions: Implementation of the physical system based on the results of the assignment. Further code troubleshooting and Q&A on ABxM
16:00pm UTC
Bus to Keplerstraße 17, Stuttgart (+snack)
17:00 – 18:30pm UTC
Presentation of workshop results
Workshop Media